
OpenCoord需要进行版本更新,按照原先的规划,更新的内容是框架和历元转换,EGM2008的读取。EGM2008的读取准备直接使用 开源 库geographiclib,由于现在有替代程序可以使用,不着急,留待以后有稍微大片的时间再更新。相对而言,框架和历元的转换更新优先级高一些。以前收集了一些资料,比较重要有2篇论文,作为本次更新的理论基础。
1、ITRF框架的相互转化, 刘 立,成英燕
ITRF地球参考框架是目前精度最高、稳定性最好的参考框架,ITRF是利用全球测站观测资料成果推算所得到的地心坐标系统,确切地说, ITRF是一个四维地心坐标参考框架,除了空间直角坐标形式的坐标外,还给出了台站的漂移速度,其坐标精度为毫米级至厘米级。
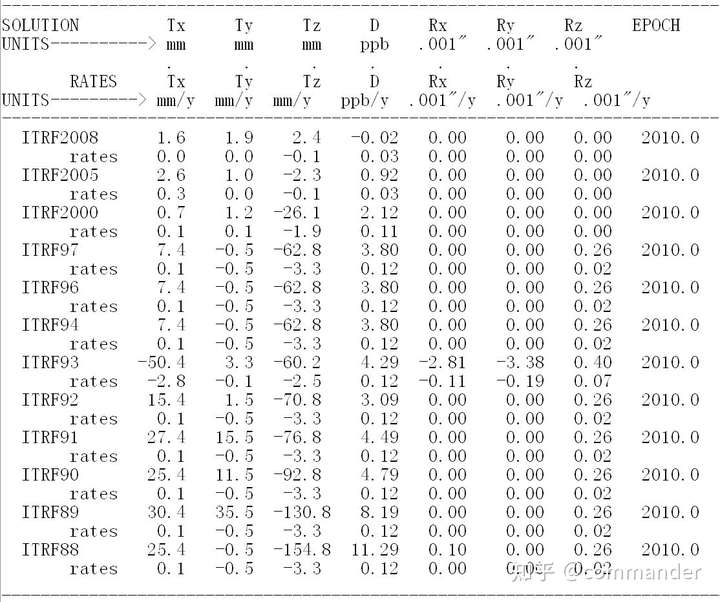
理论上讲, ITRF系列所对应的地球平极和平均格林尼治子午线应该是重合的,但ITRF参考站是通过观测获得的,由于观测手段和观测精度的不同,各个系统之间有微小的差别。但不同的ITRF框架可以通过坐标系之间的相似变换进行转换。通常,ITRF转换使用14个转换参数,即7个转换参数加上7个转换参数速率,这14个转换参数是由布尔莎-沃尔夫七参数得到的 。从ITRF2000转换到以前框架的转换参数与速率可以从网上( ftp: / / itrf.ign. fr /pub / itrf / ITRF. TP)获得。

转换步骤:
(1)统一历元

(2)框架转换

字母头上带点的是其速度。
2、ITRF 框架坐标转换问题的研究,尹伟言 ,赵鑫
简言之,ITRF是通过一组固定于地球表面且只做线性运动的大地点的坐标及坐标变化速率组成的。迄今为止,IERS已发布了ITRF88、ITRF89、ITRF90、ITRF91、ITRF92、ITRF93 、ITRF94 、ITRF96 、ITRF97 、ITRF2000 、ITRF2005、ITRF2008 这12 个版本。ITRF 随技术水平的提高、全球分布站的数量和并置站的增加以及新的测量手段的加入而不断精化。后面建立的ITRF框架之间的差别越来越小,目前达到了毫米级精度。
由于板块运动,不同时期同一参考站的位置发生了变化,而且不同参考框架下参考站的位置也不一样。因此在处理不同时期不同参考框架的数据时,应需进行框架转换和历元转换[2]。我国目前所采用的是CGCS2000 坐标系,而所使用的精密星历是IGS2008框架,历元为观测当天的瞬时历元,那么计算的结果便是ITRF2008 框架,观测当天的历元,需要通过历元转换和框架转换,将其转换成ITRF97 框架,历元2000.0,转换后的坐标便可以认为是CGCS2000 坐标系下的。
转换方法
转换一般有两种思路,一种是先进行历元转换,再进行框架转换;另一种是先进行框架转换,再进行历元转换。从理论上讲,两种方法得到的结果应该是一致的。文献[2]和文献[4]均对ITRF 框架坐标转换方法进行了一定的介绍,但并不全面,而且有些历元参数不是很清楚且容易搞混,因此笔者在此基础上略加修改,使转换过程及结果更加清晰且容易理解。下面具体介绍一下转换的方法。

先转换框架再转换历元,不仅不知道观测时速度,而且较为繁琐且降低了精度,因此最常用的还是先转换历元,再转换框架。
(1)历元转换
由于地壳运动,GPS 测站在框架内的位置随时间而变化,这种运动一般比较缓慢,可近似为匀速线性运动,因此某历元的坐标计算公式可表示为:

(2)框架转换、
根据ITRFxx框架与ITRFyy 框架之间的14 个转换参数,按照BURSA 七参数坐标转换模型进行转换。7个转换参数并不是固定不变的,在任意时刻的7 个参数需要考虑变化速率,因此首先要解算出T2 历元两个框架之间的7 个转换参数,其公式为:

式中,T 为三个平移量,D 为一个尺度因子,R 为三个旋转量。



ppb=10负9次方,mas,毫角秒
ITRF2014至其它框架转换参数


发表评论: