-
 阅读全文
阅读全文各平台发文编辑的技巧及转移至知乎
作者:xiaokcehui2025.12.19 others
以前的流程是这样的:在本网站编辑文字,图片通过附件添加,然后,拷贝至微信公众号。后来微信公众号不支持这样的拷贝导入。微信公众号提供word文件导入,网页文字及图片可以拷贝word,然后再导入。 ...
-
 阅读全文
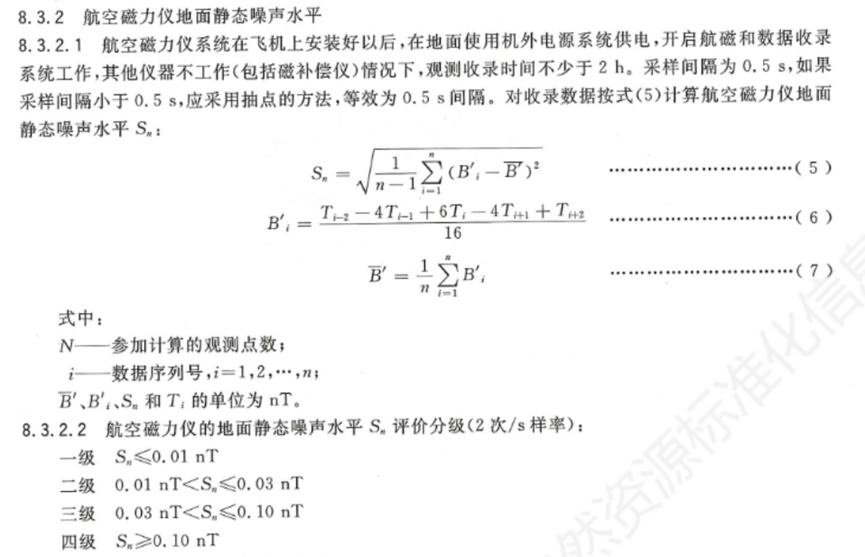
阅读全文海洋磁力仪性能评价的三个标准
作者:xiaokcehui2025.12.18 gravity&mag
《海洋磁力测量技术规范》没有海洋磁力仪性能评估公式,据行业人士说,海洋磁力仪性能评估是参考《航空磁测技术规范》8.3.2的静态噪声评估公式,见下图。 航空磁力仪系统在飞...
-
 阅读全文
阅读全文GOCAD三维地质建模
作者:xiaokcehui2025.12.13 GIS使用
用Petrel进行三维地质建模以后,三维地质模型可以导出RESQML格式的文件。 RESQML(RESQML的英文全称是 Reservoir Characterization Ma...
-
 阅读全文
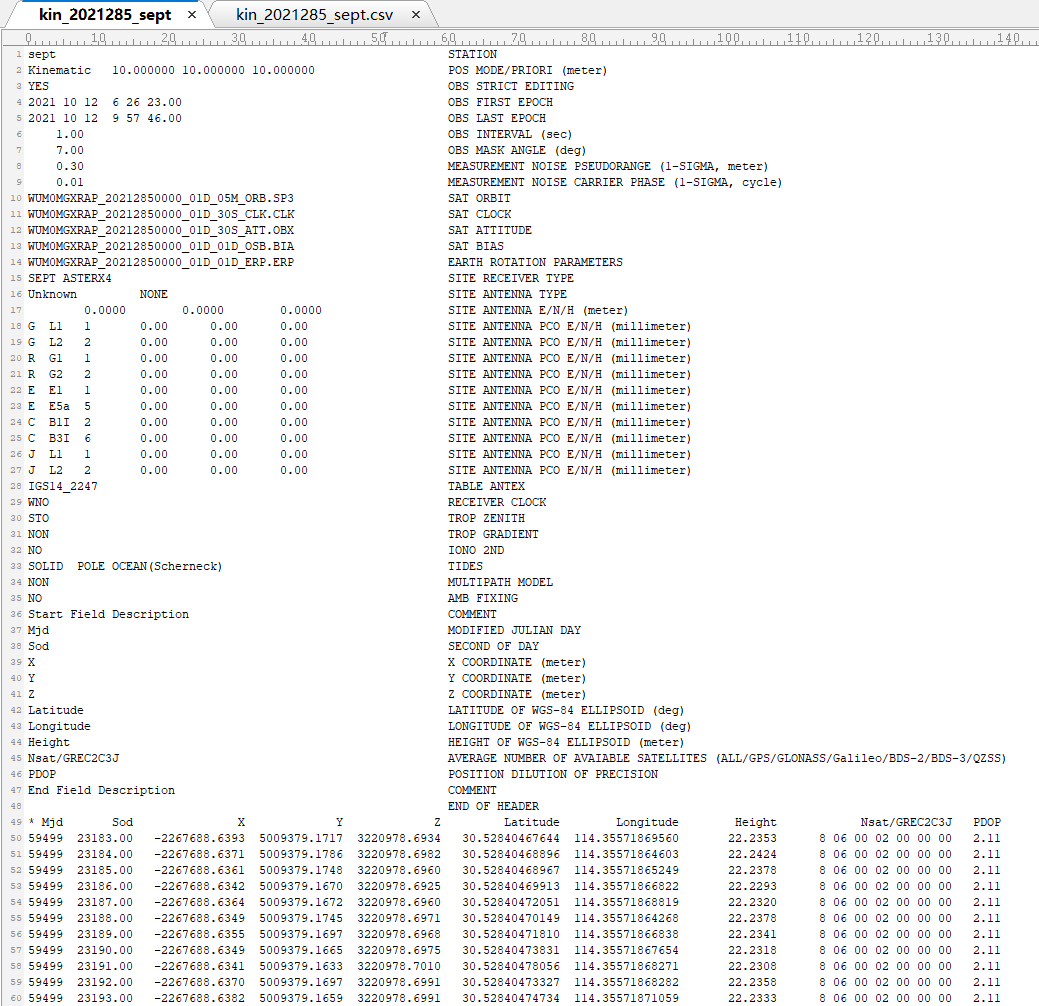
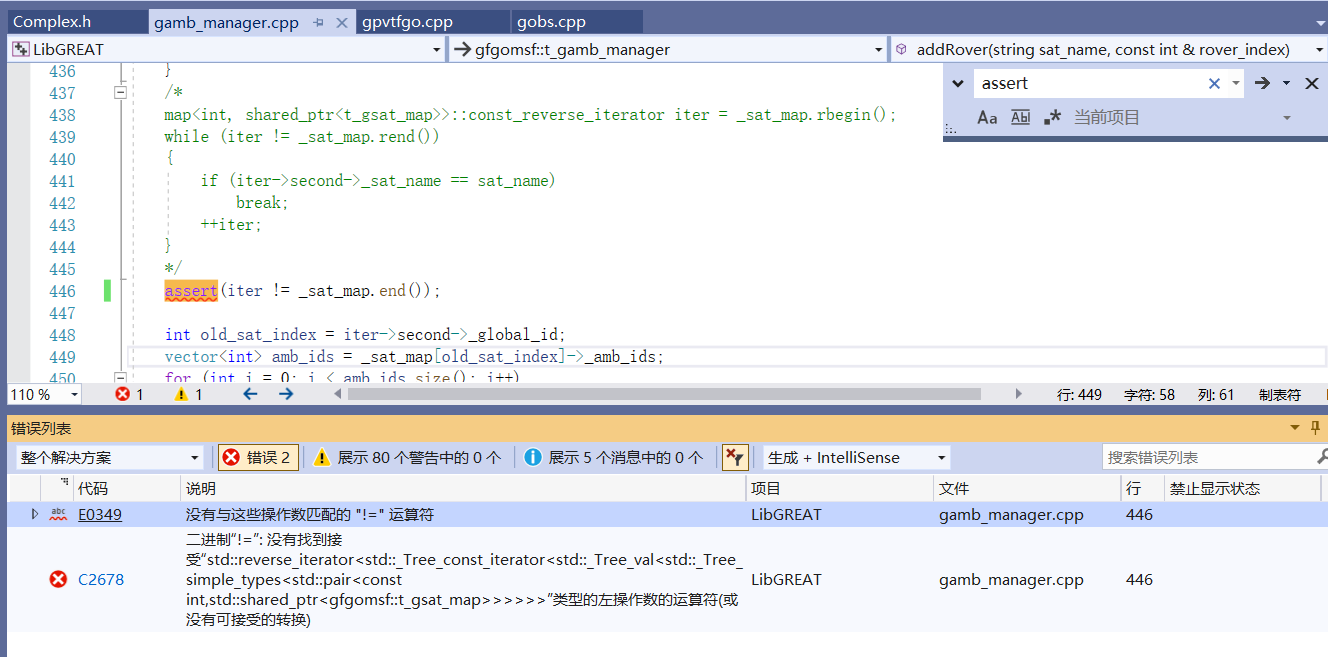
阅读全文武汉大学GREAT团队因子图优化定位开源代码RTK测试(下)
作者:xiaokcehui2025.12.5 GNSS
上一篇介绍了精密定位模块GREAT-PVT,并以它自带的例子进行了RTK解算。经过使用,我们了解了GREAT的主要功能类似POSMV的后处理软件POSPAC MMS,如果手头上没有联合解算定位和...
-
 阅读全文
阅读全文武汉大学GREAT团队因子图优化定位开源代码RTK测试(上)
作者:xiaokcehui2025.11.28 GNSS
之前我们介绍过了武汉大学耿老师团队的开源PPP软件PRIDE-PPPAR,其处理GNSS数据非常好用,而且精度高。最近又听说了武汉大学GREAT(GNSS+ REsearch, Applicat...
-
 阅读全文
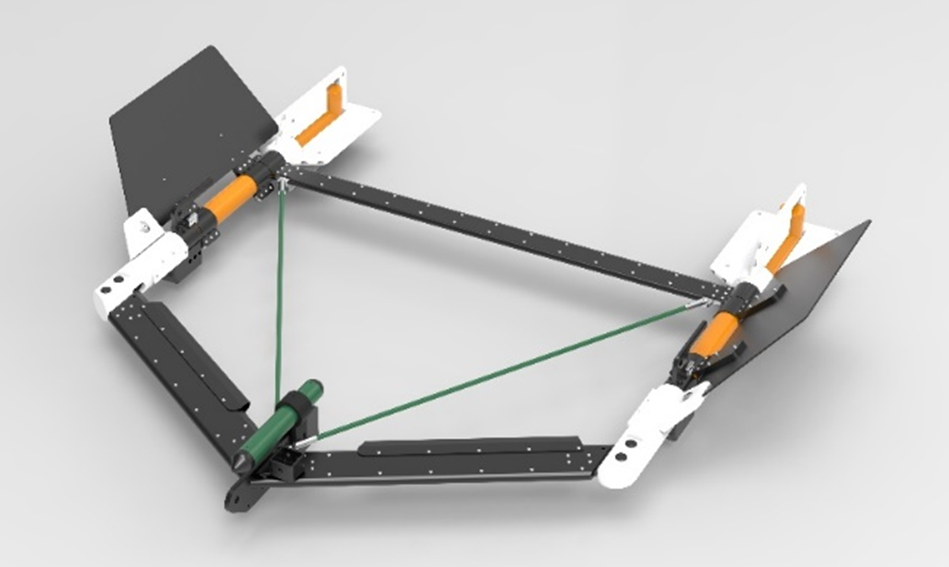
阅读全文磁力梯度仪找海底埋藏的废弃钢管桩
作者:xiaokcehui2025.11.26 gravity&mag
国产磁力仪厂商上海央祥的迟工最近给博主发了一个他们用磁力梯度仪找海底埋藏废弃钢管桩的实例材料。测区水深约5m,埋藏的钢管桩长约12m,直径约0.3m。下图是他们的磁力仪梯度仪。 ...
-
 阅读全文
阅读全文如何切分多波束测线处理
作者:xiaokcehui2025.11.23 sb/multibeam
最近使用caris12处理多波束数据过程中,发现了一个现象,在某条测线的中间,roll值发生了较大的变化,问了外业人员,曾经听船上说船底响了一下,但是设备安装状态似乎没有改变。 ...
-
 阅读全文
阅读全文非声探潜技术之三重力梯度探测(下)
作者:xiaokcehui2025.11.21 gravity&mag
地球重力场是地球的重要物理属性,其可用于表征地球内部和表层的密度分布、物质运动状态。重力梯度反映重力场在全空间的变化率,垂直重力梯度是重力位于铅直方向的二阶导数,因此垂直重力梯度对地下物质的分布...
-
 阅读全文
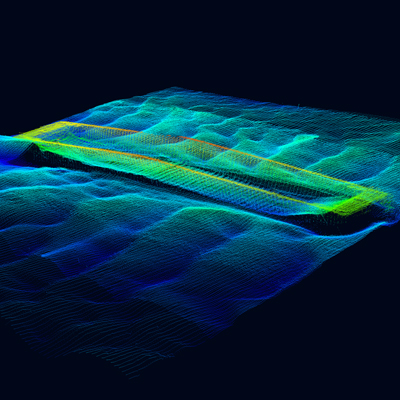
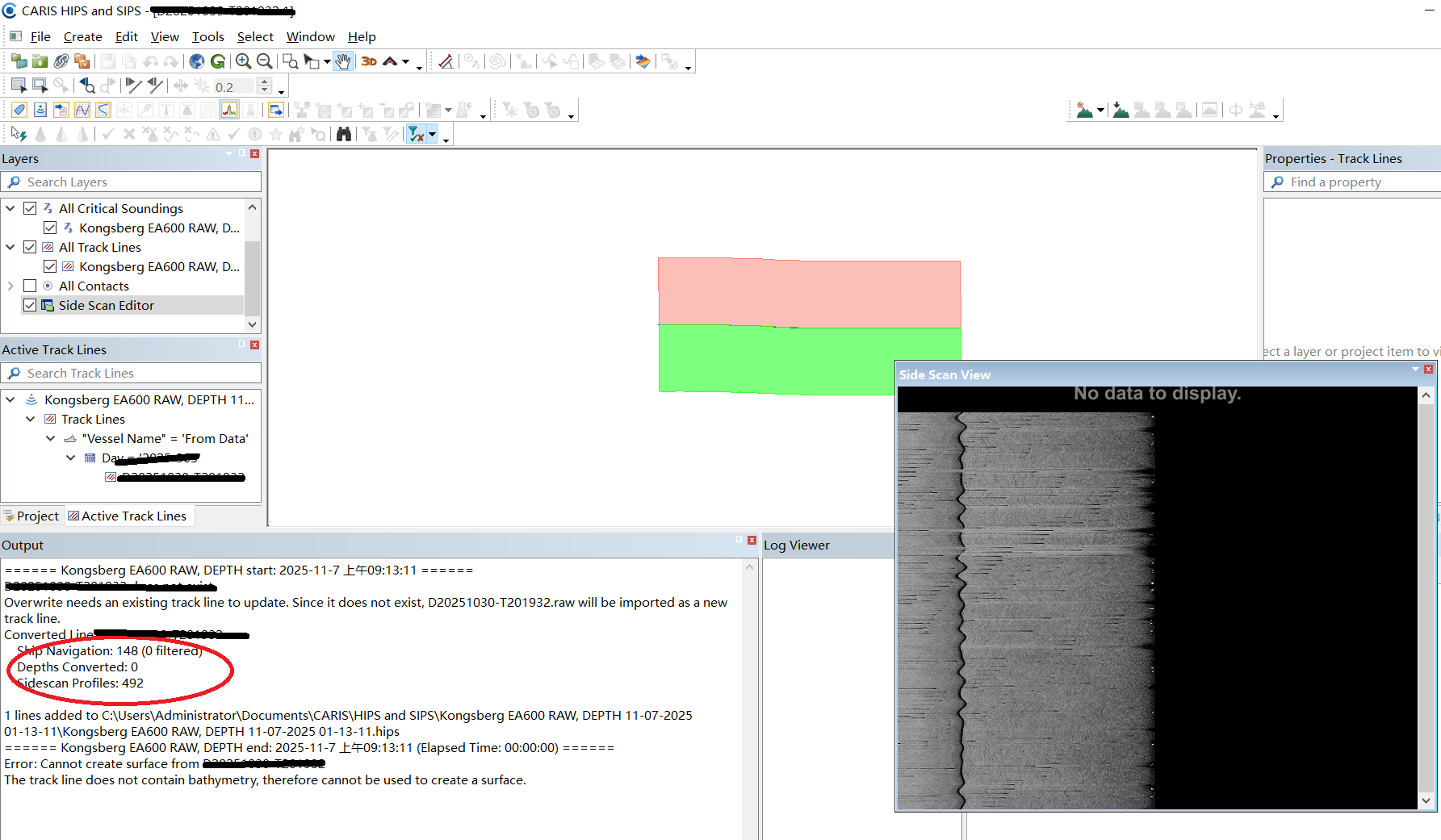
阅读全文万米单波束EA640的raw数据处理
作者:xiaokcehui2025.11.15 sb/multibeam
最近遇到一个问题:使用CARIS12处理EA640记录的raw数据不成功,导入结果显示:有导航和侧扫数据,无深度数据,非常奇怪,见下图。 从CARIS12 的支持格...
-
 阅读全文
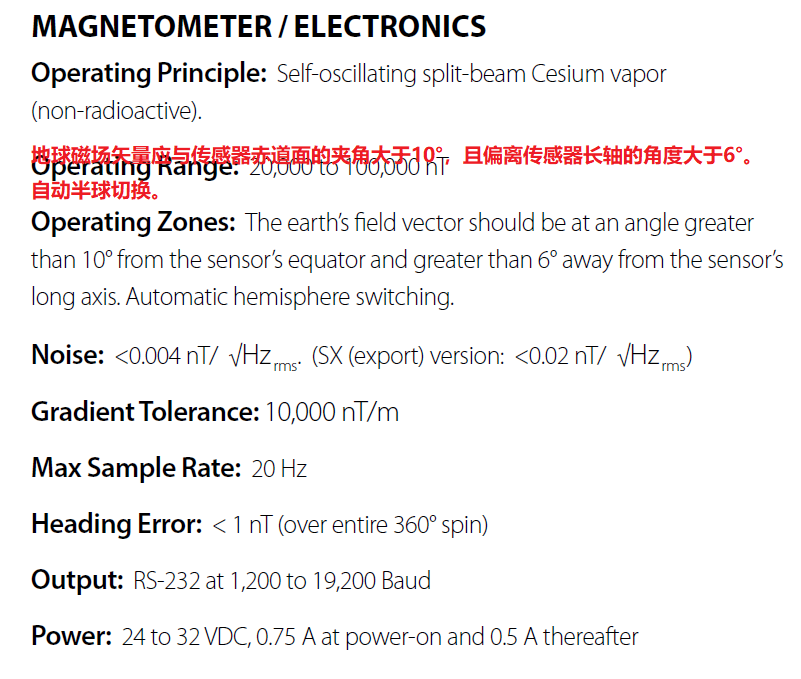
阅读全文G882磁力仪方向调整
作者:xiaokcehui2025.11.9 gravity&mag
G882的技术参数如下图所示,其中关于磁力仪使用范围描述为:地球磁场矢量应与传感器赤道面的夹角大于10°,且偏离传感器长轴的角度大于6°。自动半球切换。 表征地磁场...

-
日历
-
最新评论
-
地质人员
-
xiaokcehui
-
-
钻木生松
-
xiaokcehui
-
-
xiaokcehui
-
kangkang
-
xiaokcehui
-
lcl009
-

xiaok海洋测绘网 | 关于我们 | 联系我们 | 留言建议 | 广告合作
©2014-2015 xiaok海洋测绘网 All right reserved. 版权所有
Powered by emlog & Themes by xiaokcehui