-
 阅读全文
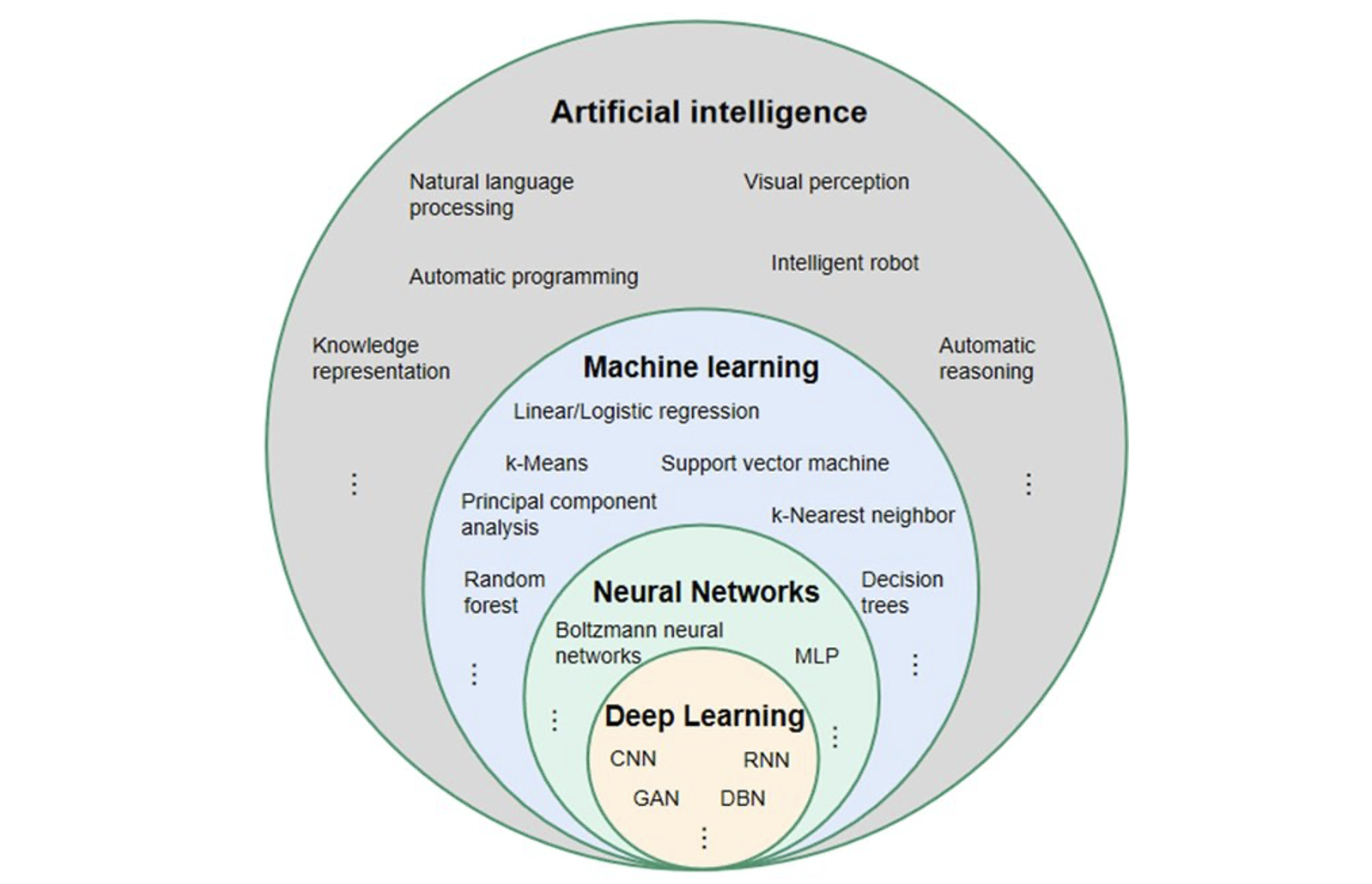
阅读全文深度学习与神经网络及其应用
作者:xiaokcehui2025.2.8 others
最近看目标识别的文献,许多人工智能的概念诸如机器学习、深度学习、神经网络模型、深度神经网络模型把人搞得晕头转向。查了一些资料,总算明白点了。 人工智能、机器学习、...
-
 阅读全文
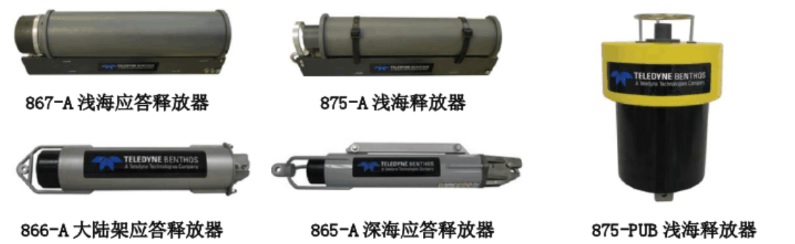
阅读全文Benthos释放器使用记录
作者:xiaokcehui2024.10.27 others
最近有个项目需要用到释放器,而我们的IXBlue释放器全都在太平洋潜标上,因此,我们从兄弟单位借了1套Benthos的浅水释放器。之前同事也借用过这款设备,但是都忘记怎么使用了。大家都说使用非常...
-
 阅读全文
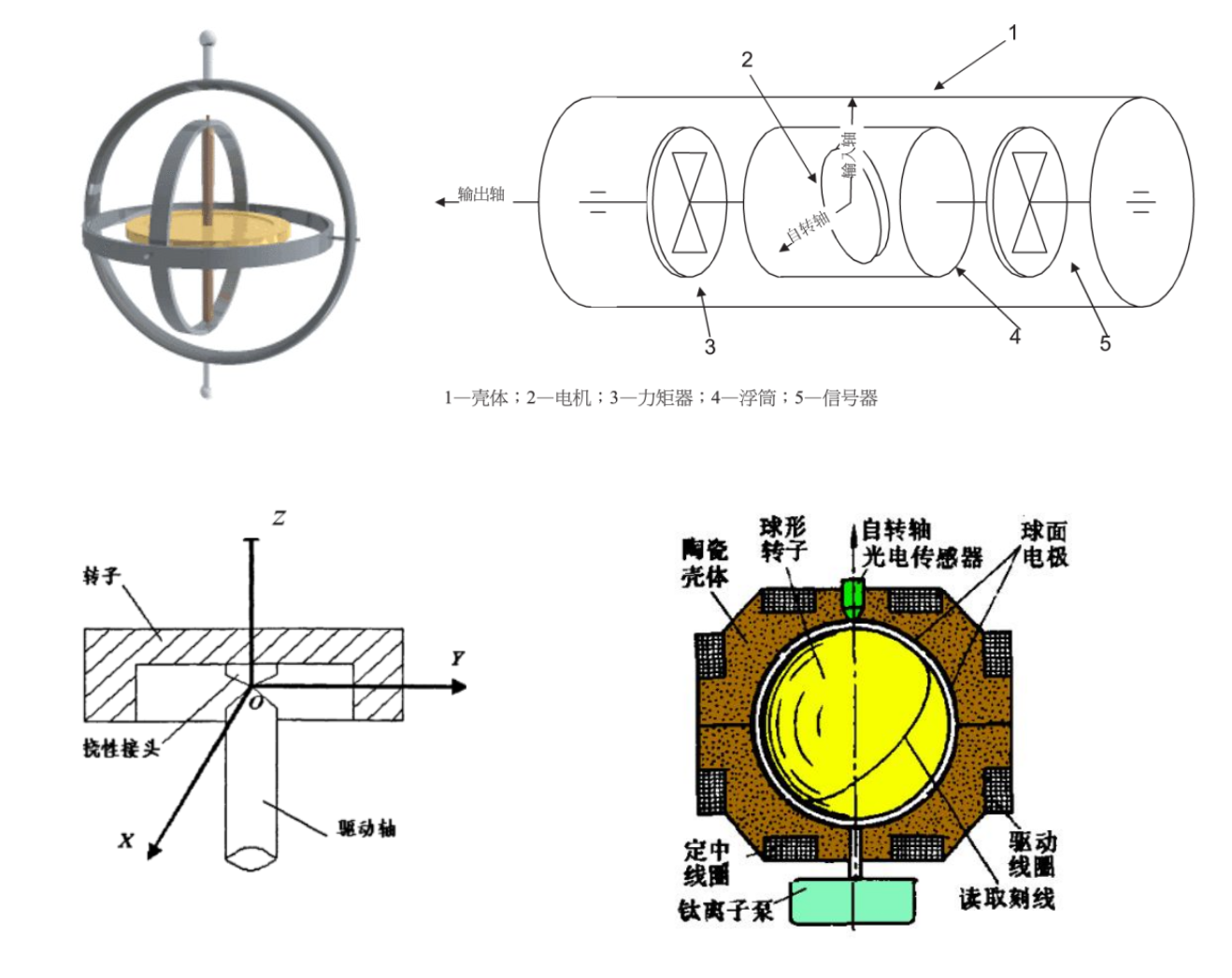
阅读全文长航时陀螺惯性导航系统有哪些?
作者:xiaokcehui2024.8.23 others
从1910年至今,陀螺仪的发展经历了四代,第一代是滚珠轴承支承陀螺,第二代是液浮气浮陀螺,第三代是挠性支承(即允许支承位置有一定变形)的转子陀螺,第四代包括静电陀螺、激光陀螺、光纤陀螺和MEMS...
-
 阅读全文
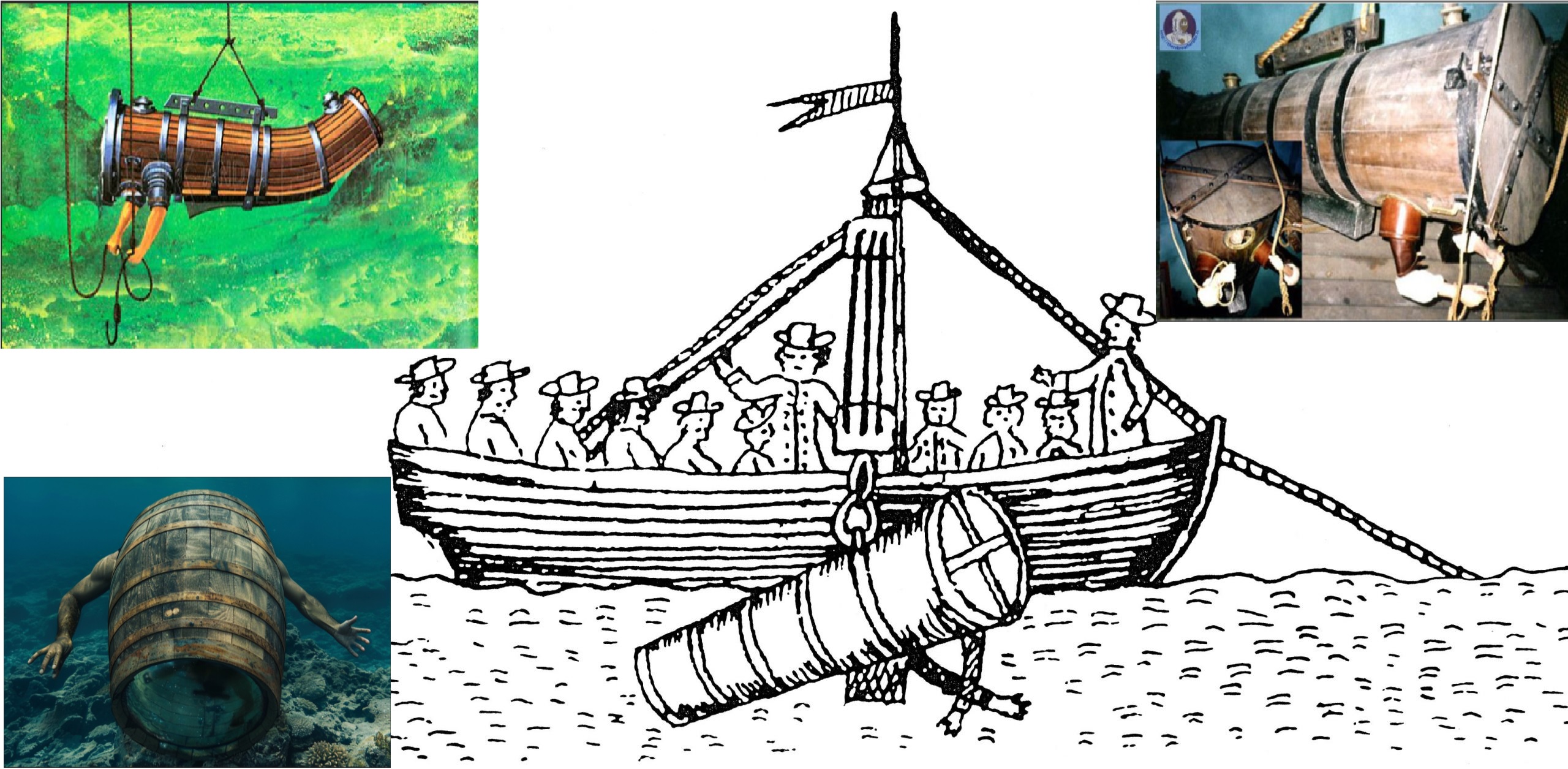
阅读全文什么是常压潜水系统ADS(Atmospheric Diving System)(下)
作者:xiaokcehui2024.7.27 others
从1715年第一种潜水装具的诞生,到1984年 NEWSUIT装具出现,至目前最新型EXOsuit的发明, 装具已经有300年的发展历史。装具发展的历史进程来看,前期主要为英国和欧洲国家占主导地...
-
 阅读全文
阅读全文什么是常压潜水系统ADS(Atmospheric Diving System)(上)
作者:xiaokcehui2024.7.21 others
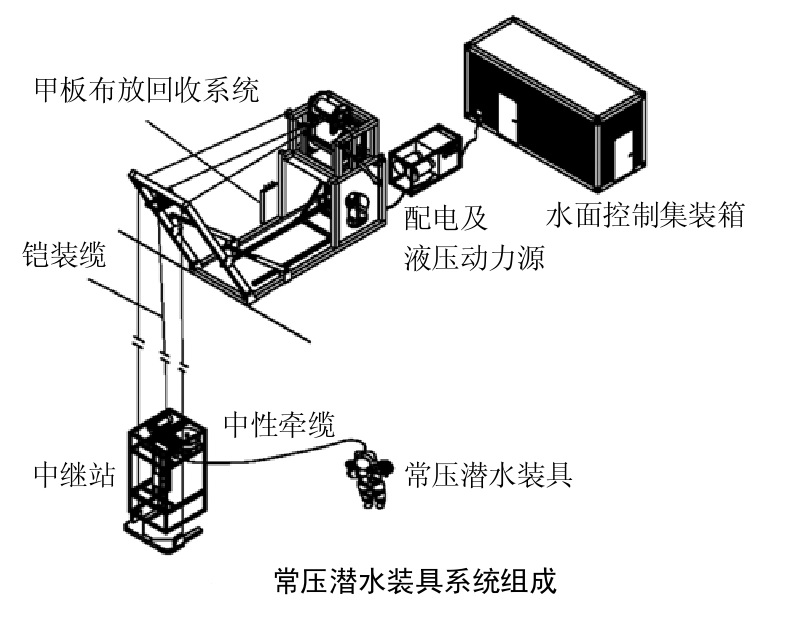
常压潜水装具系统是一种拟人形的深海载人水下作业系统,其由装具、中继站、水面起吊及水面控制系统组成。配备该系统的潜水员可直接到达作业现场进行观察、水下航行,并借助活动关节,控制两手的夹持器及专用工...
-
 阅读全文
阅读全文什么是距离选通型水下三维激光扫描仪?(下)
作者:xiaokcehui2024.6.22 others
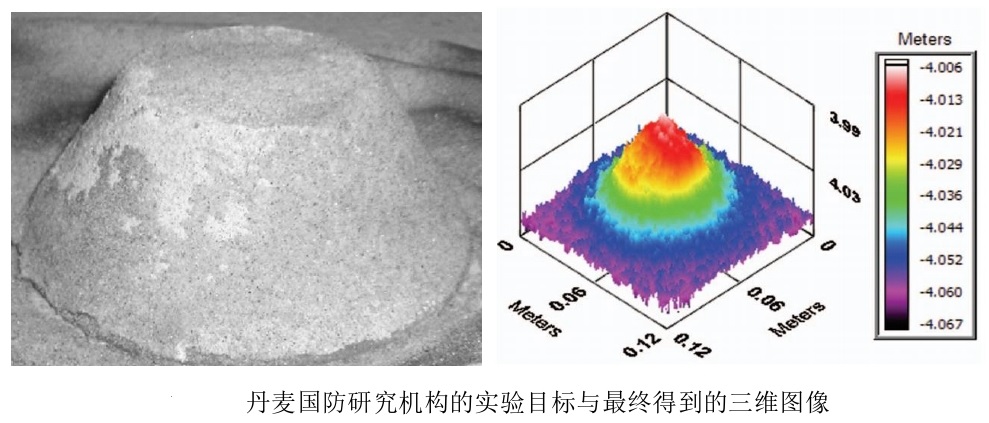
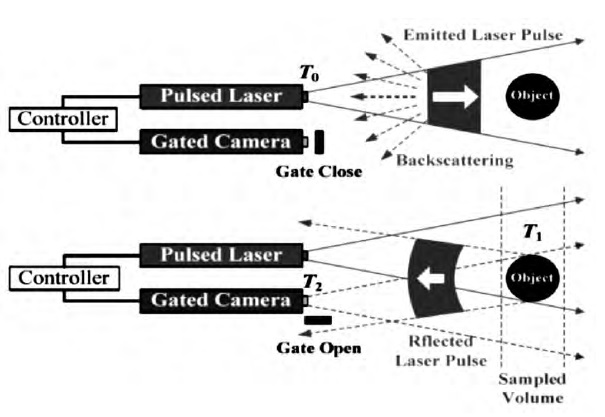
距离选通激光水下成像的发展 距离选通激光成像技术始于上世纪60年代,受制于高性能脉冲激光器和选通成像器件发展的制约,激光距离选通成像技术在随后的二十年发展缓慢,直...
-
 阅读全文
阅读全文海底管缆先敷后埋与边敷边埋有什么区别?
作者:xiaokcehui2024.6.13 others
海缆铺设有两种方式:“边敷边埋”和“先敷后埋”。 “边敷边埋”冲埋式埋设犁施工法———通过埋设犁(水力开沟机)泵送高压水,在海底冲出一条沟槽的同时,将海缆平铺下去,然后利用在潮汐...
-
 阅读全文
阅读全文什么是距离选通型水下三维激光扫描仪?(上)
作者:xiaokcehui2024.6.6 others
最近听说了一种水下三维激光扫描仪——距离选通型激光扫描仪,有可能应用于近岸水下目标高分辨率成像。博主之前用过ULS-500水下激光扫描仪,并写了一篇博文观察级水下机器人使用系列之五三维激光扫描仪...
-
 阅读全文
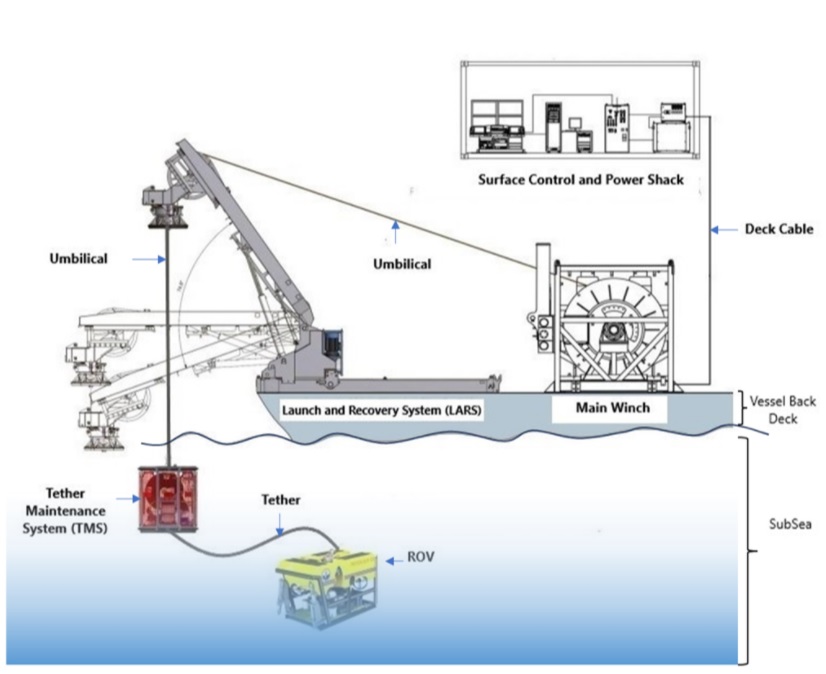
阅读全文水下机器人(ROV)中继器(TMS)究竟是个啥?
作者:xiaokcehui2024.4.30 others
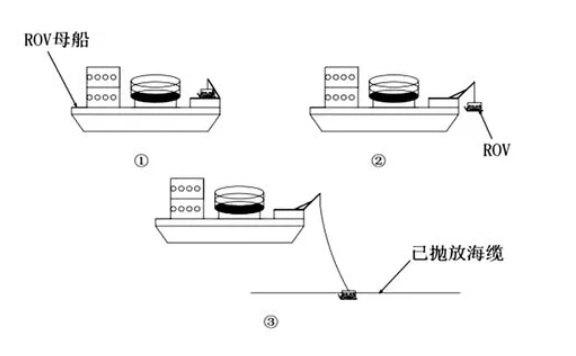
前段时间公众号后台有人问释放ROV的装置,由于只用过观察级ROV Valor,博主一直以为他说的是绞车,后来才明白他说的是中继器,在水中用来释放、控制和回收ROV的装置。 中继器T...
-
 阅读全文
阅读全文公众号答疑集锦(4月)之IE,二维声纳,hypack处理内河多波束
作者:xiaokcehui2024.4.11 others
1、Inertial Explorer这款软件怎么导出txt或csv格式的轨迹文件? 答:https://mp.weixin.qq.com/s/Rtl_3YJjDQblyVPLXj...

-
日历
-
最新评论
-
xiaokcehui
-
-
xiaokcehui
-
kangkang
-
xiaokcehui
-
lcl009
-
xiaokcehui
-
aaGG爆
-
xiaokcehui
-
-

xiaok海洋测绘网 | 关于我们 | 联系我们 | 留言建议 | 广告合作
©2014-2015 xiaok海洋测绘网 All right reserved. 版权所有
Powered by emlog & Themes by xiaokcehui