-
 阅读全文
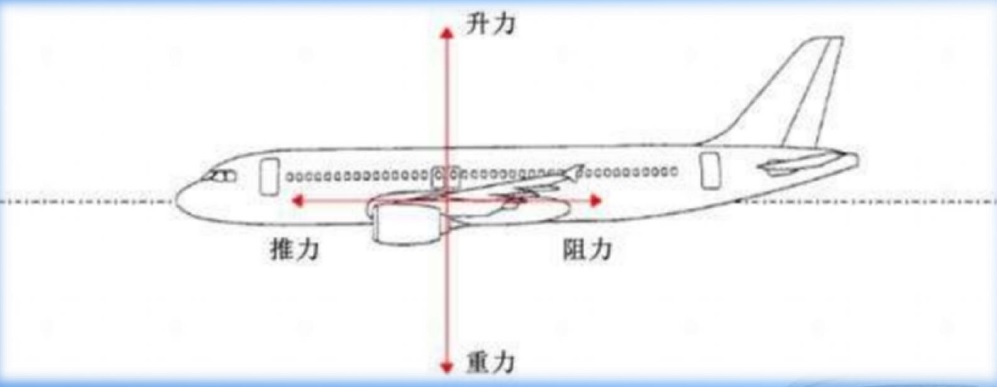
阅读全文固定翼无人机培训第一周总结——飞行原理和画图
作者:xiaokcehui2023.4.25 others
固定翼无人机培训时间已经过半,博主发现自己想学的东西与无人机培训的内容有点不匹配,自己想学如何飞无人机,但是培训的重点内容却是理论和航线规划,就像以前学习电工证的时候,自己想学焊接,但是电工培训...
-
 阅读全文
阅读全文回答网友提出的一些问题集合(2023年2月)
作者:xiaokcehui2023.3.21 others
本文汇总了最近一些网友提出的问题,对于这些问题,博主都是根据自己的经验进行了回答,受制于有限的水平,有些回答可能会存在错误。将这些问答集中放在这里也是希望起到抛砖引玉的作用,熟悉相关问题的读者朋...
-
 阅读全文
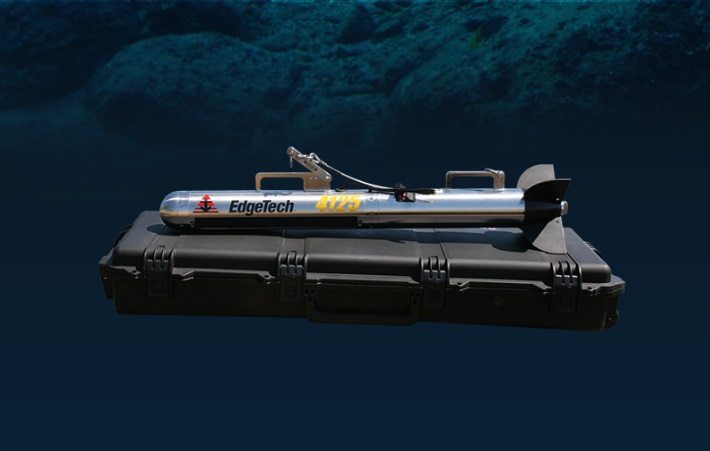
阅读全文无人机测深三种方法-激光雷达,测深仪和探地雷达
作者:xiaokcehui2022.12.27 others
最近搜素了论文和相关网页,博主总结了一下无人机测深总共有三种办法: (1)激光雷达; (2)测深仪; (3)探地雷达(GPR)。 1、激光...
-
 阅读全文
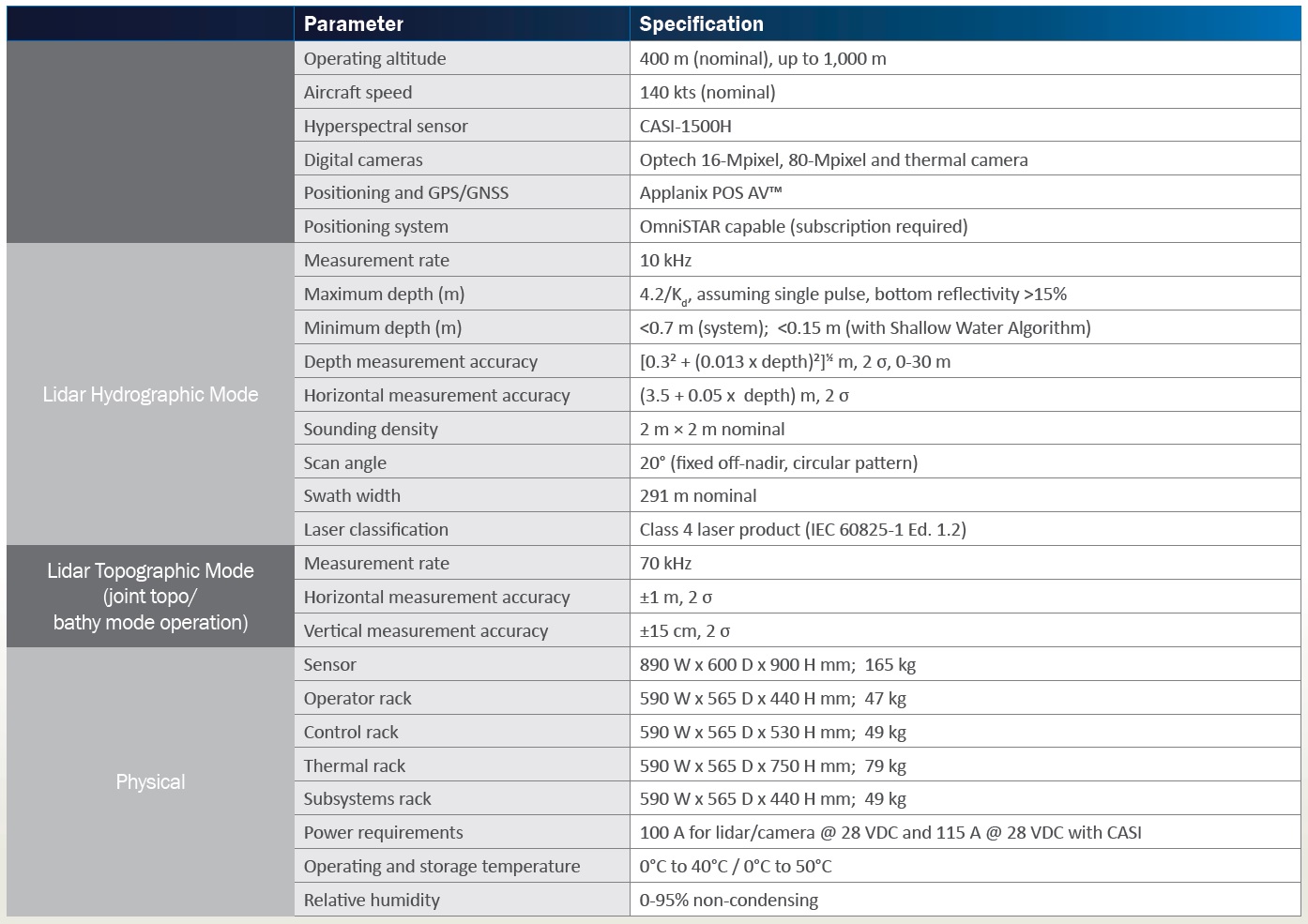
阅读全文遥感测深方法综述(三)机载雷达测深系统关键参数
作者:xiaokcehui2022.12.16 others
下面两张图分别是CZMIL Nova和SuperNova的技术参数,从图中可以看出,与最大探测深度有关的参数是Kd ,且标称的最大深度4.X/Kd要求底质反射率大于15%。 ...
-
 阅读全文
阅读全文第二次热带海洋近岸作业记录--广西北海
作者:xiaokcehui2022.10.24 others
上一次热带海洋近岸作业区域是在三亚,作业区域是个小港湾,由于水深较浅,租用的船舶是个只有几米长的交通艇。作业内容主要是单波束、侧扫声呐和电火花,水深是通过单波束和RTK人工跑滩相结合的方式进行...
-
 阅读全文
阅读全文中国自主潜航器AUV—潜龙号
作者:xiaokcehui2022.9.17 others
“潜龙”系列目前包括“潜龙一号”、“潜龙二 号”、“潜龙三号”和“潜龙四号”。“潜龙一号”是由我国与俄罗斯共同研制的“CR-01”系列改造而成的6000米级无人自治式潜水器,采用回转体形式,可...
-
 阅读全文
阅读全文北部湾及涠洲岛海域潮汐和海平面特征
作者:xiaokcehui2022.9.2 others
广西沿海地区水文系统布设有石头埠、白龙、龙门、冠头岭、三娘湾等潮位观测站,其中石头埠、白龙、龙门为国家基本站,冠头岭、三娘湾为专用海浪观测站。 广西沿海的潮汐,主要是由西太平洋...
-
 阅读全文
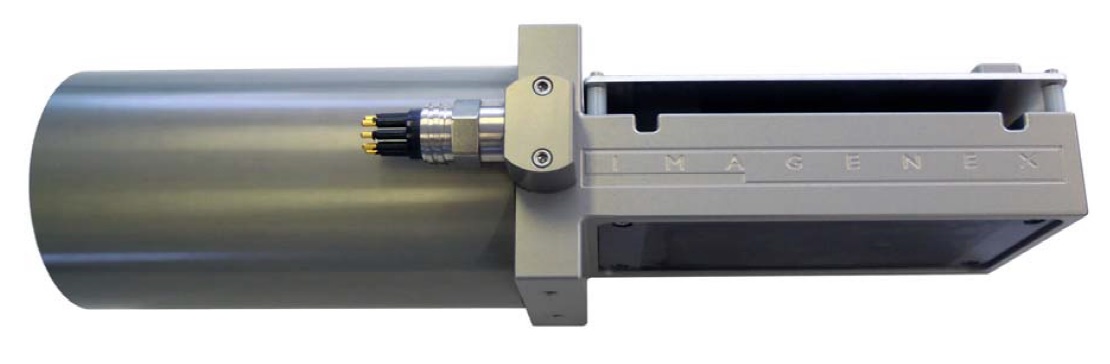
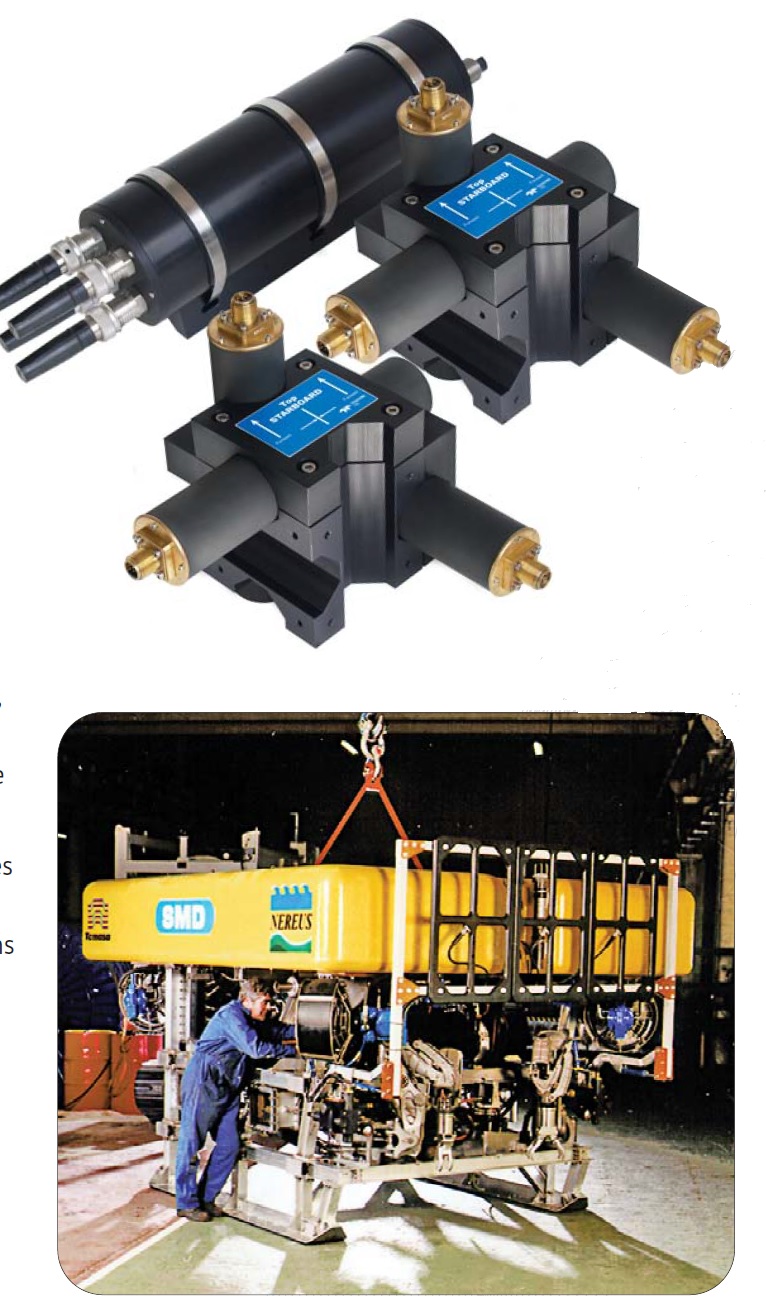
阅读全文海缆探测仪TSS350(三)
作者:xiaokcehui2022.8.5 others
本文是海缆探测仪TSS350的第3集,主要内容是在ROV中TSS350和多波束剖面声呐共同进行海缆探测。 管缆挖沟后,若任其自然回填,那么管沟回填不完全的情况极有可能发生,在实...
-
 阅读全文
阅读全文海缆探测仪TSS350(一)
作者:xiaokcehui2022.7.23 others
目前近海测量项目中,探测海缆的方法主要是侧扫声呐、浅地层剖面仪,磁力仪和海缆仪。浅地层剖面仪能探测海缆的位置和深度,但严重依赖于底质情况,大多数时候,底质与海缆反射一样,难以从地层反射中分辨出海...
-
 阅读全文
阅读全文水下机器人ROV和AUV
作者:xiaokcehui2022.7.16 others
水下机器人,也可以称为无人水下潜航器(Unmanned Underwater Vehicle,UUV),是在水下的极限环境中运行并能潜入水面替代人进行某种动作的可控机器结构。水下无人潜航器通常可...

-
日历
-
最新评论
-
xiaokcehui
-
-
xiaokcehui
-
kangkang
-
xiaokcehui
-
lcl009
-
xiaokcehui
-
aaGG爆
-
xiaokcehui
-
-

xiaok海洋测绘网 | 关于我们 | 联系我们 | 留言建议 | 广告合作
©2014-2015 xiaok海洋测绘网 All right reserved. 版权所有
Powered by emlog & Themes by xiaokcehui