-
 阅读全文
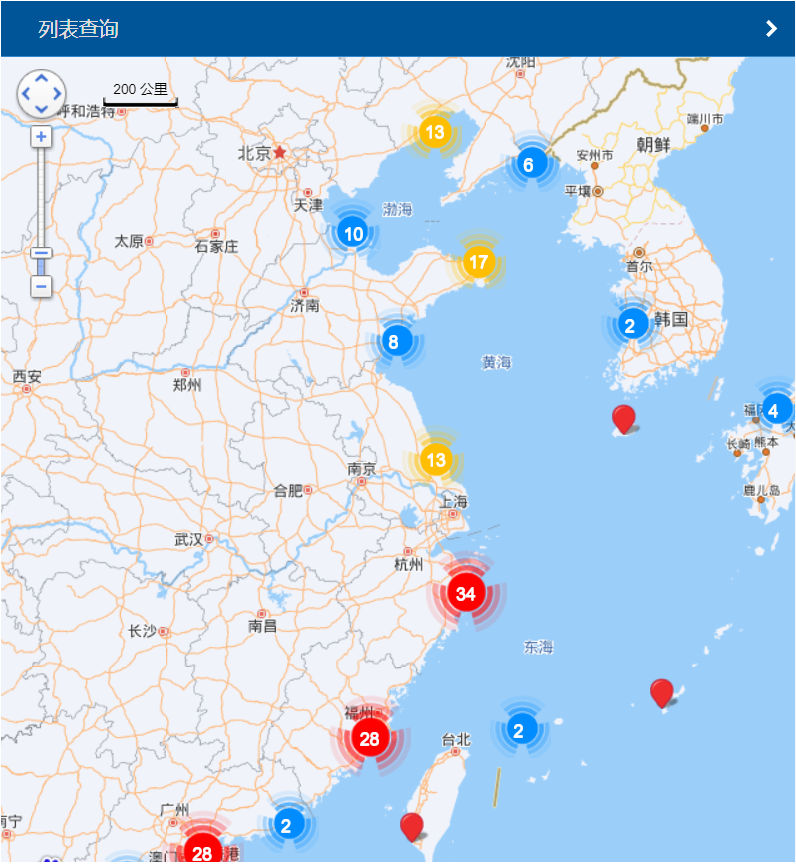
阅读全文免费提供POSMV的GNSS数据解算服务,验潮仪丢失的一种补救
作者:xiaokcehui2022.12.19 GNSS
前两天有个网友问干活的区域附近是否有长期验潮站,因为他的临时验潮仪丢失了,随后问了一下搞水文的同事,他推了一个网址: http://publictide.nmdis.org.cn/...
-
 阅读全文
阅读全文站长常用规范
作者:xiaokcehui2018.1.9 GNSS
差分GPS规范定位误差小于10m GBT 17424-2009 差分全球导航卫星系统(DGNSS)技术要求.pdf 海上定位中误差小于7.5m/5m G...
-
 阅读全文
阅读全文什么是常压潜水系统ADS(Atmospheric Diving System)(下)
作者:xiaokcehui2024.7.27 others
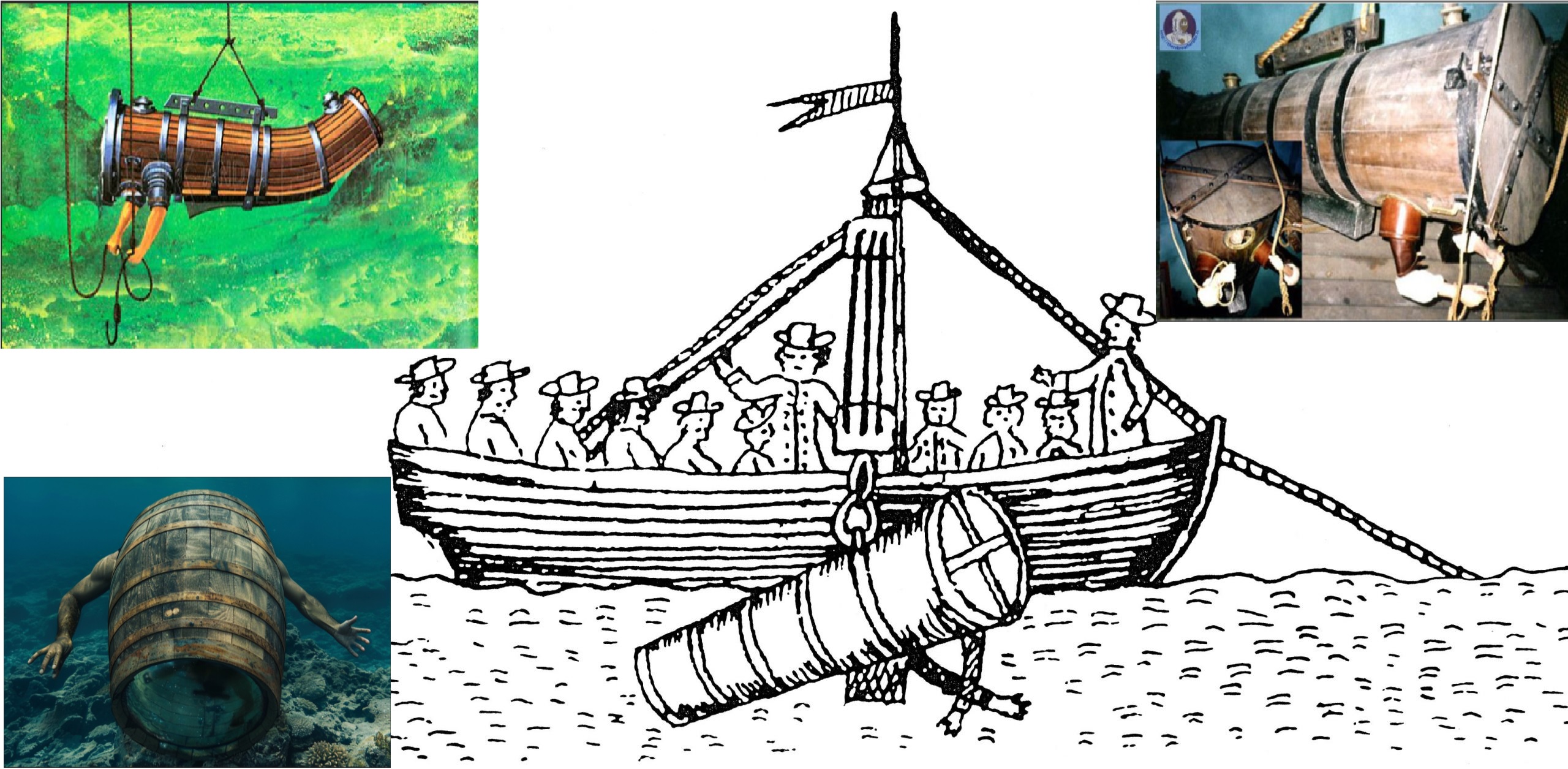
从1715年第一种潜水装具的诞生,到1984年 NEWSUIT装具出现,至目前最新型EXOsuit的发明, 装具已经有300年的发展历史。装具发展的历史进程来看,前期主要为英国和欧洲国家占主导地...
-
 阅读全文
阅读全文什么是常压潜水系统ADS(Atmospheric Diving System)(上)
作者:xiaokcehui2024.7.21 others
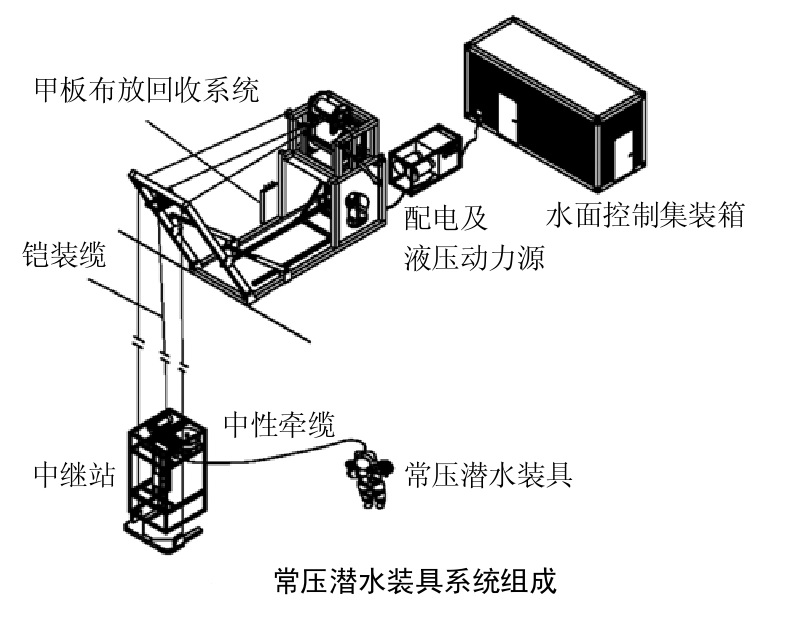
常压潜水装具系统是一种拟人形的深海载人水下作业系统,其由装具、中继站、水面起吊及水面控制系统组成。配备该系统的潜水员可直接到达作业现场进行观察、水下航行,并借助活动关节,控制两手的夹持器及专用工...
-
 阅读全文
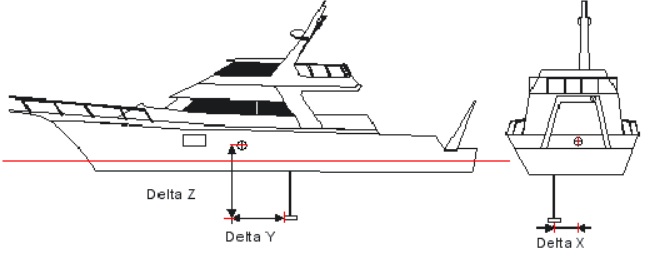
阅读全文多波束常用设备的坐标系统
作者:xiaokcehui2024.7.11 sb/multibeam
CARIS处理多波束的时候,一般首先要建立船型文件,采集的设备或软件不同,其船型文件也不同,其中最关键就是采集设备和软件的坐标系统。 为了使用方便,不用费力地去查对...
-
 阅读全文
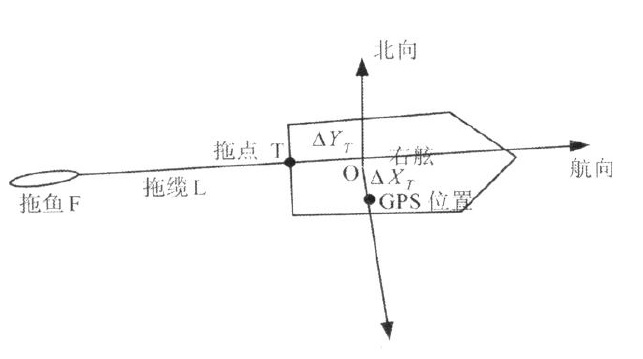
阅读全文G882磁力仪拖鱼位置是如何计算的?
作者:xiaokcehui2024.6.28 gravity&mag
根据参考文献,磁力仪拖鱼位置计算有两种方法: 1、直线法 直线计算法是假设不考虑海流、船摆等动态因素的影响,拖鱼与拖点始终和航向相同,即整个拖拽系统与船舶是刚性连接。...
-
 阅读全文
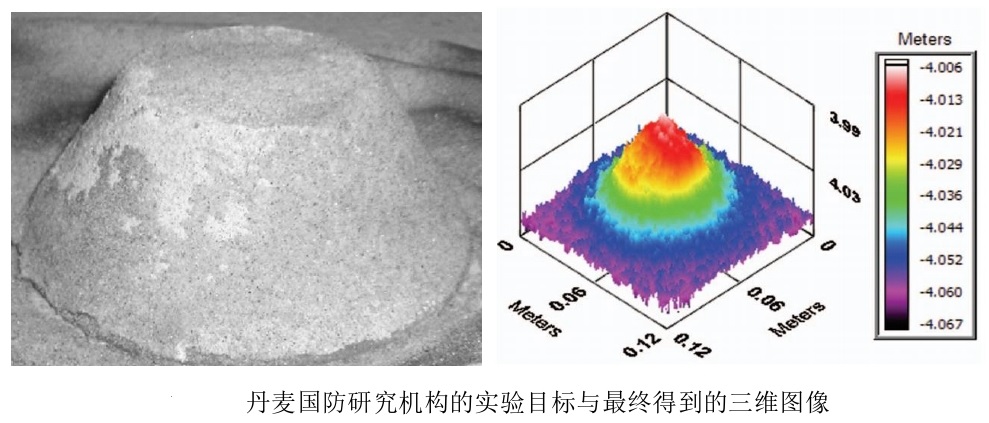
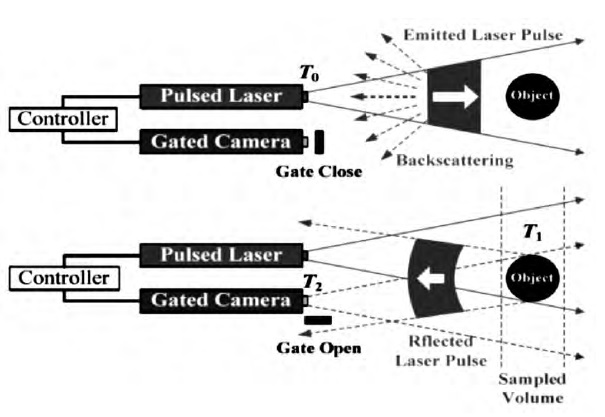
阅读全文什么是距离选通型水下三维激光扫描仪?(下)
作者:xiaokcehui2024.6.22 others
距离选通激光水下成像的发展 距离选通激光成像技术始于上世纪60年代,受制于高性能脉冲激光器和选通成像器件发展的制约,激光距离选通成像技术在随后的二十年发展缓慢,直...
-
 阅读全文
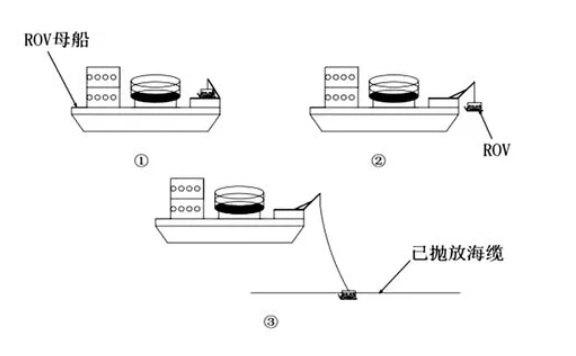
阅读全文海底管缆先敷后埋与边敷边埋有什么区别?
作者:xiaokcehui2024.6.13 others
海缆铺设有两种方式:“边敷边埋”和“先敷后埋”。 “边敷边埋”冲埋式埋设犁施工法———通过埋设犁(水力开沟机)泵送高压水,在海底冲出一条沟槽的同时,将海缆平铺下去,然后利用在潮汐...
-
 阅读全文
阅读全文什么是距离选通型水下三维激光扫描仪?(上)
作者:xiaokcehui2024.6.6 others
最近听说了一种水下三维激光扫描仪——距离选通型激光扫描仪,有可能应用于近岸水下目标高分辨率成像。博主之前用过ULS-500水下激光扫描仪,并写了一篇博文观察级水下机器人使用系列之五三维激光扫描仪...
-
 阅读全文
阅读全文hypack如何采集多波束数据?(下)
作者:xiaokcehui2024.5.27 sb/multibeam
多波束测量模块 1)记录多波束和辅助传感器的数据; 2)显示实时改正后的数据和数据质量信息。 测量准备 1)设置大地测量参...

-
日历
-
最新评论
-
xiaokcehui
-
Tiny Hu
-
xiaokcehui
-
11111
-
Yukki
-
xiaokcehui
-
11111
-
xiaokcehui
-
-
-

xiaok海洋测绘网 | 关于我们 | 联系我们 | 留言建议 | 广告合作
©2014-2015 xiaok海洋测绘网 All right reserved. 版权所有
Powered by emlog & Themes by xiaokcehui