
最新精彩内容专注行业与圈内动态,分享最具价值内容
-
 阅读全文
阅读全文Geosoft欧拉三维反演重磁目标的空间位置
作者:xiaokcehui2025.9.7 gravity&mag
搞重磁的同学可能对Geosoft比较熟悉,一般都用它来进行数据成图。比方说,我们用自己编写的软件处理重磁原始数据,得到磁异常数据和布格重力数据,然后用它生成格网图、平剖图、等值线图。其实,不仅仅...
-
 阅读全文
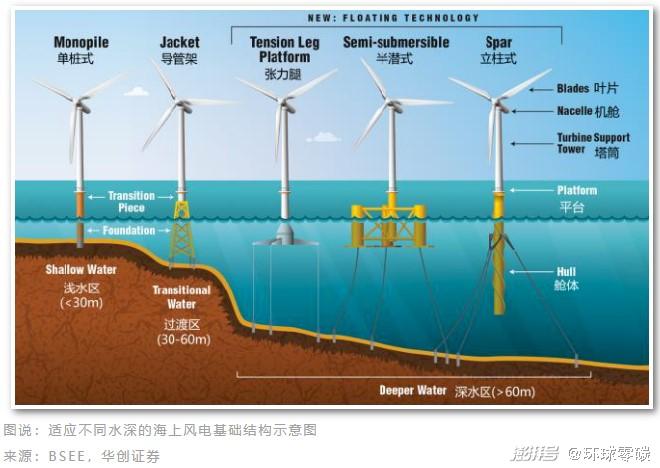
阅读全文海上风电安装施工定位方法(下)风机和平台安装测量
作者:xiaokcehui2025.8.29 GNSS
上篇讲了海上安装施工定位方法的关键技术—罗经校正;中篇讲了海上风电安装施工的步骤;本篇主要讲施工中用到的测量方法。 我们先看2003年的文献1安装赵东区块ODA(钻进平台)和OPA...
-
 阅读全文
阅读全文海上风电安装施工定位方法(中)风机和平台安装施工
作者:xiaokcehui2025.8.23 others
最近发现电脑端和手机端信息之间存在一堵墙,不能互通,比如昨天在bing搜索了1条消息,然后想查这条消息的来源,怎么也搜索不到,后来微信搜一搜搜索到了。微信已经成为了一个独立于电脑的信息库。如果我...
-
 阅读全文
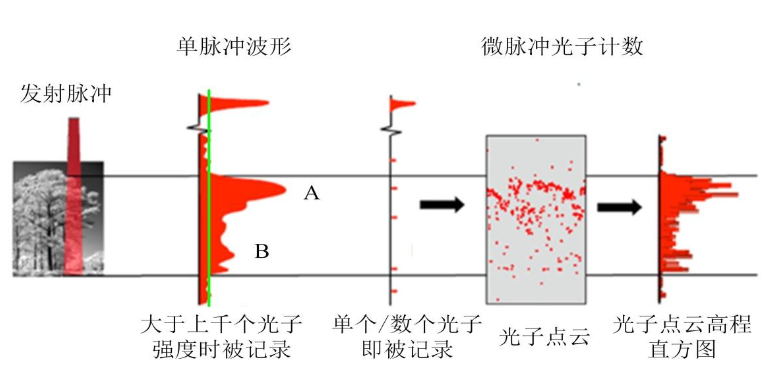
阅读全文单光子及光子计数雷达(上)原理
作者:xiaokcehui2025.8.16 others
前段时间参加了第三届海岸带大会,重点关注了水下光学部分。水下光学成像(激光探测和测距Light Detection and Ranging, LiDAR)分为主动光学成像和被动光学成像。被动光学...
-
 阅读全文
阅读全文海洋大地测量基准与水下导航系列之九我国海洋PNT最新技术进展(下)
作者:xiaokcehui2025.8.2 GNSS
三、海洋PNT技术装备研发与工程化应用 1.海底基准装备 研制了首批适应海洋环境的多型海底基准站装备,在我国南海海域成功布设了定位精度优于0.25m的海底大地测量试验...
-
 阅读全文
阅读全文海上风电安装施工定位方法(上)电罗经校正
作者:xiaokcehui2025.7.25 GNSS
去年申请了一个海洋行业标准,在标准的启动会上,专家都说初稿的内容有点跑题,标准内容基本要重新写。查了大量的文献和相关标准以后,开始动手写,写了2个月仅写了1/6的样子,卡住了,怎么也写不下去,拖...
-
 阅读全文
阅读全文海洋大地测量基准与水下导航系列之九我国海洋PNT最新技术进展(中)
作者:xiaokcehui2025.7.22 GNSS
二、我国首个海底大地测量基准试验网建成依据 我国在“十三五”期间开展了海底大地控制网建设工作,填补了我国大地测量基准在广阔海域的空白,为国家海底大地测量基准可行性论证提供了技术支持...
-
 阅读全文
阅读全文海洋大地测量基准与水下导航系列之九我国海洋PNT最新技术进展(上)
作者:xiaokcehui2025.7.5 GNSS
“十三五”期间,我国构建了大地测量基准试验验证系统,取得了许多重要理论与技术成果,突破了海底基准站位设计、制造、布放、标校和维护等关键技术,自主研发了稳固、抗压、防腐、防拖的双信标基准方舱,解决...
-
 阅读全文
阅读全文实景三维不仅仅是好看
作者:xiaokcehui2025.6.23 海洋三维(OEP3D)
上文提到“透视山东”的开发均由国内软件及企业完成,比如中地MapGIS、超图SuperMap,还有一家单位——青岛市勘察测绘研究院也深度参与其中。 青岛市勘察测绘研究院近几年在实景...
-
 阅读全文
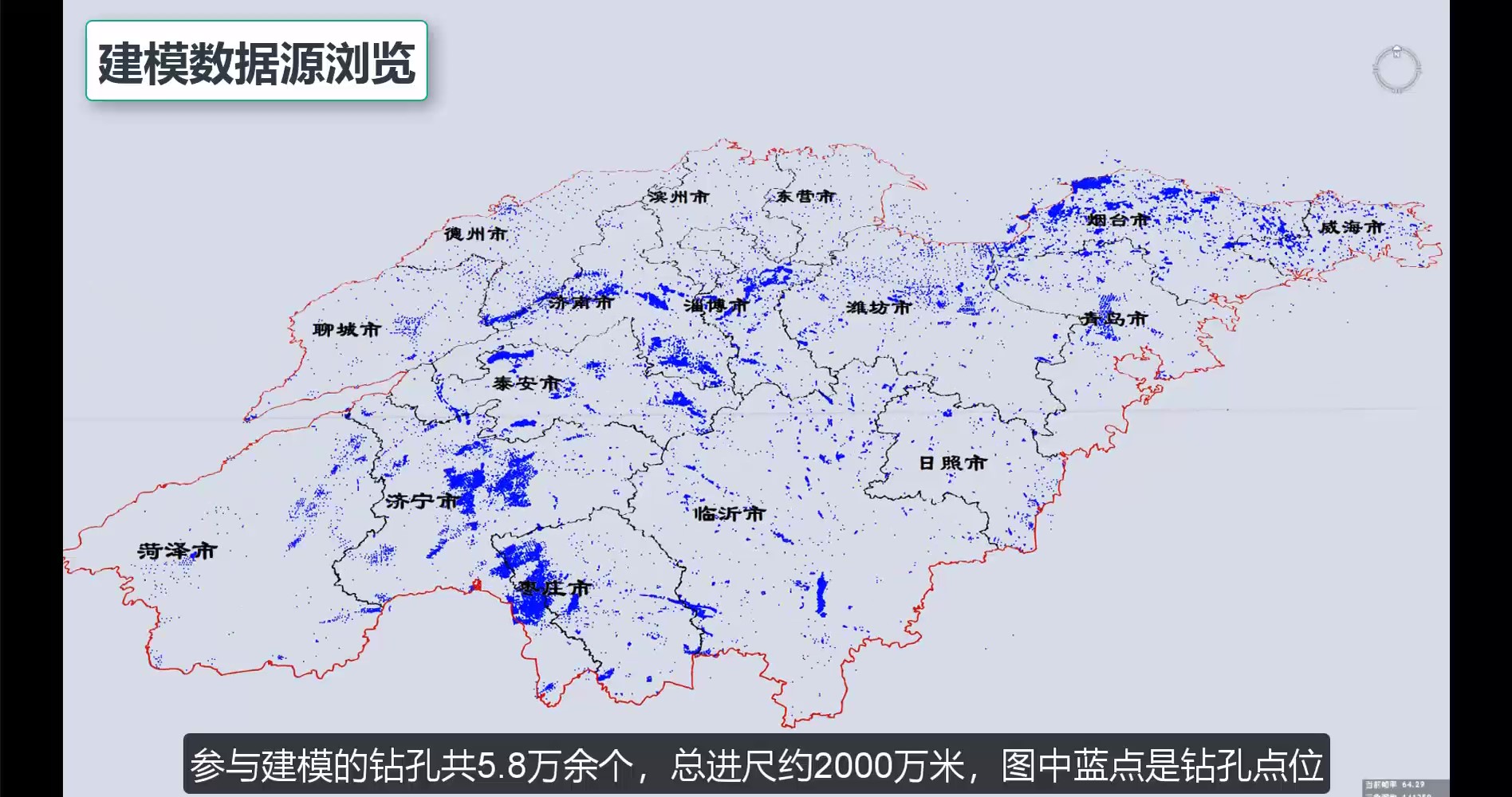
阅读全文“透视山东”真厉害啊
作者:xiaokcehui2025.6.14 海洋三维(OEP3D)
“透视山东—地质信息集成与综合利用”项目于2020年启动建设,于2023年7月完成了阶段性成果验收,是数字中国的典范工程。 一是首次建立了山东省地质大数据库,实现了馆藏地质成果的全...

-
日历
-
最新评论
-
地质人员
-
xiaokcehui
-
-
钻木生松
-
xiaokcehui
-
-
xiaokcehui
-
kangkang
-
xiaokcehui
-
lcl009
-

xiaok海洋测绘网 | 关于我们 | 联系我们 | 留言建议 | 广告合作
©2014-2015 xiaok海洋测绘网 All right reserved. 版权所有
Powered by emlog & Themes by xiaokcehui